Hi, I'm Rohan Punamiya.
A
I am a robotics engineer who gets excited solving challenging problems in mechanical design, mechatronics, controls engineering, and motion simulation. As an innovative and driven engineer with knowledge ranging from control algorithms/vehicle dynamics to structural design/simulation, I strive to make a significant impact in the field of robotics and automation!
Robotics engineer focused on mechanical design, mechatronics, controls, and motion simulation.
About
My passion for robotics came to life during my time at the Georgia Tech Robotics Club (RoboJackets). I was captivated by the way robots could interact with the physical world and solve complex problems. This fascination fueled my journey through my Bachelor's in Mechanical Engineering from Georgia Tech, where I specialized in robotics, mechatronics, and controls engineering. I have since worked on a variety of projects, from designing microprocessor-controlled prosthetic knees to building autonomous under-ice vehicles, all of which led me to pursue a Master's in Mechanical Engineering at Stanford University with a focus on Robotics. I am fascinated by challenges like robotic manipulation, sensor fusion, and adaptive control, which push the boundaries of what machines can achieve.
- 2024 Engineer In Training. Georgia State Board of Registration for Professional Engineers
- 2023 President's Undergraduate Research Award. Georgia Institute of Technology
- 2022 CRLA International Tutor Certification (ITTPC). Georgia Institute of Technology
As an international student born in India and raised in Singapore, I have a unique perspective on the world around me. Coupling this diverse background with a wealth of experiences across different work environments (from start-ups to large technology corporations) has given me the ability to adapt quickly and tackle challenges with a global mindset. Whether it's developing algorithms for path planning, designing hardware for assistive devices, or advancing robot perception, I aim to contribute to technologies that improve lives, from medical devices to autonomous systems.
I'm looking for opportunities to work in a challenging position which leverages my deep understanding of robotics, mechatronics, and controls engineering. I am eager to learn new technologies and tools to effect change and solve complex problems.
Experience
- Designed MPC-based whole-body controllers for simulation of future products in Mujoco.
- Built and analyzed FE simulations for capacitive tactile sensors.
- Completed various mechanical design tasks for next-gen robots.
- Tools: Mujoco, Python, COMSOL, Sensor Manufacturing, SolidWorks, 3D Printing

- Adapted content to 30+ students' needs, resulting in multi-grade improvements in Physics, Math, and Mechanical Engineering.
- Completed CRLA International Tutor Training Program Certification (ITTPC).
- Advised and managed tutors, lead weekly group training meetings to improve tutor’s leadership skills.
- Designed an automated flow test and mechanical fixture to characterize over ½ million voice coil valves per year for prosthetic knee production. Reduced manual testing time from 45 minutes to 20 seconds.
- Performed system ID on custom voice coil valves, and assisted design of a nonlinear controller, enhancing steady-state response by 20% and transient response by 31%.
- Collaborated with cross-functional engineering team to redesign and test prosthetic frame/sensors.
- Tools: Python, MATLAB, SolidWorks, FEM, MTS Machines, ESD Testing
- Analyzed over 2.4 million real-time data entries to determine 10 groups of failure points for product courses.
- Created PyTorch automated testing program, reducing testing time from 1 week to 24 hours per course.
- Collaborated with VP's, salespeople, programmers, and other full-time employees/interns.
- Tools: Python, PyTorch, Excel
- Tailored content to the diverse needs of 300+ students, resulting in multi-grade improvements in machine design.
- Advised and managed tutors, lead weekly group training meetings to improve tutor's leadership skills.
Projects
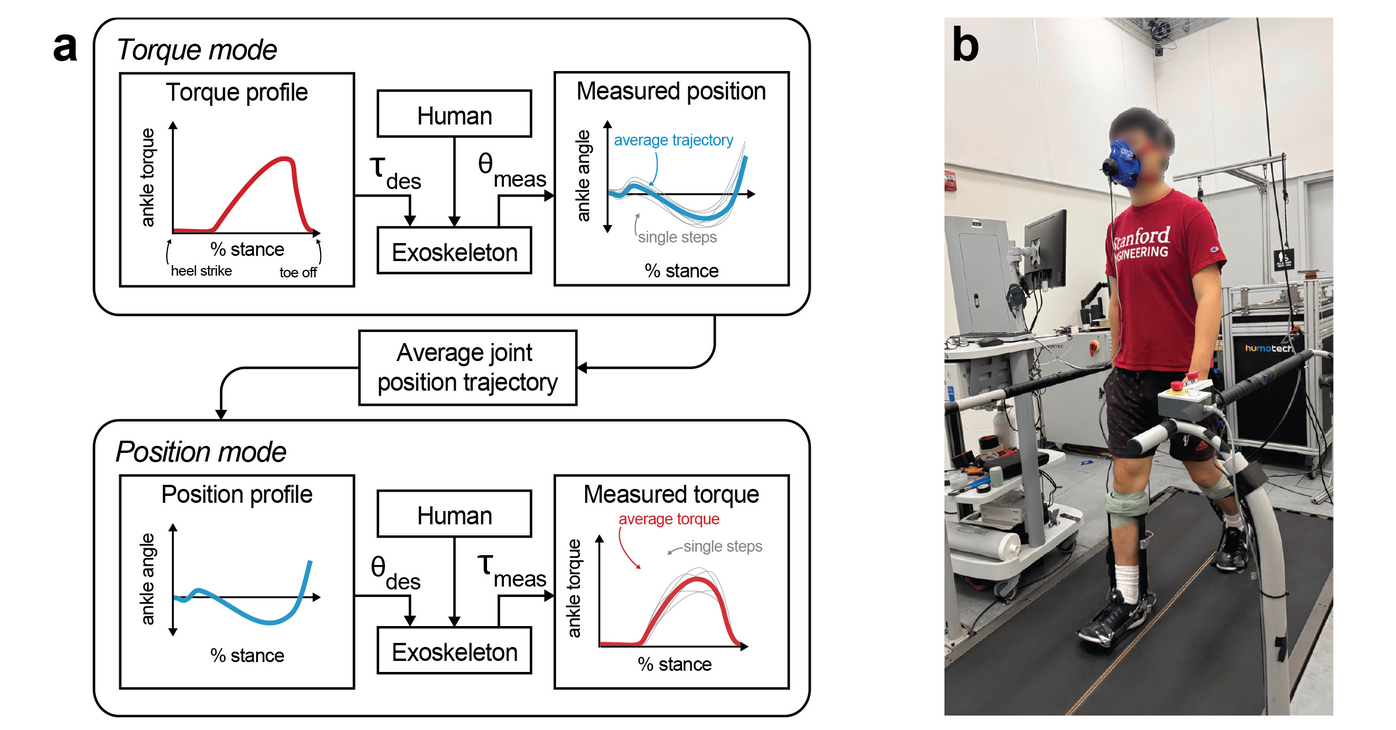
Built and compared torque and position controllers for a bilateral ankle exoskeleton. In review at IEEE-TMRB.
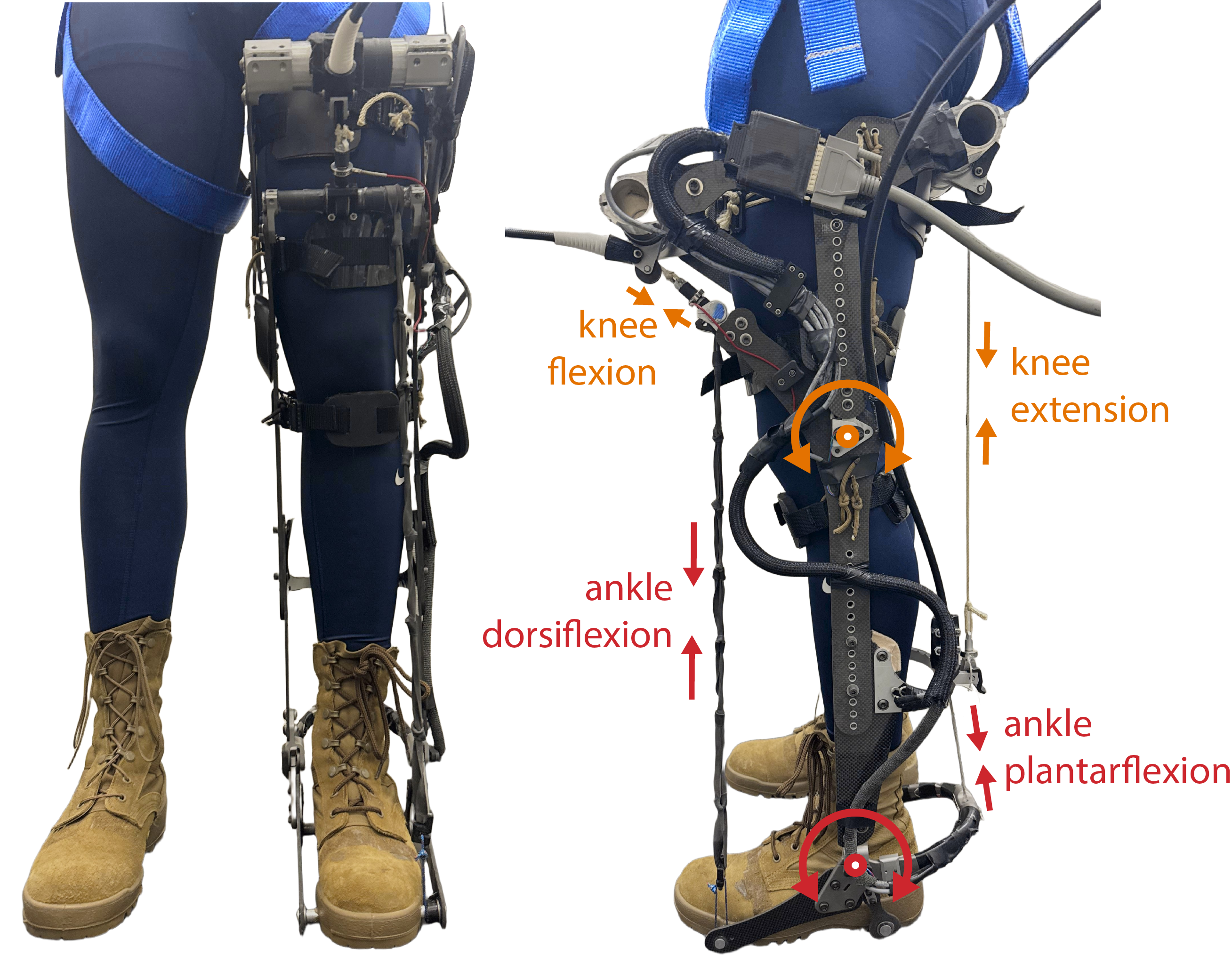
Optimized and studied knee-ankle exoskeleton assistance for people with stroke. In review at JNER.

Designed grasping policies and grippers for manipulation with force feedback in cluttered environments.
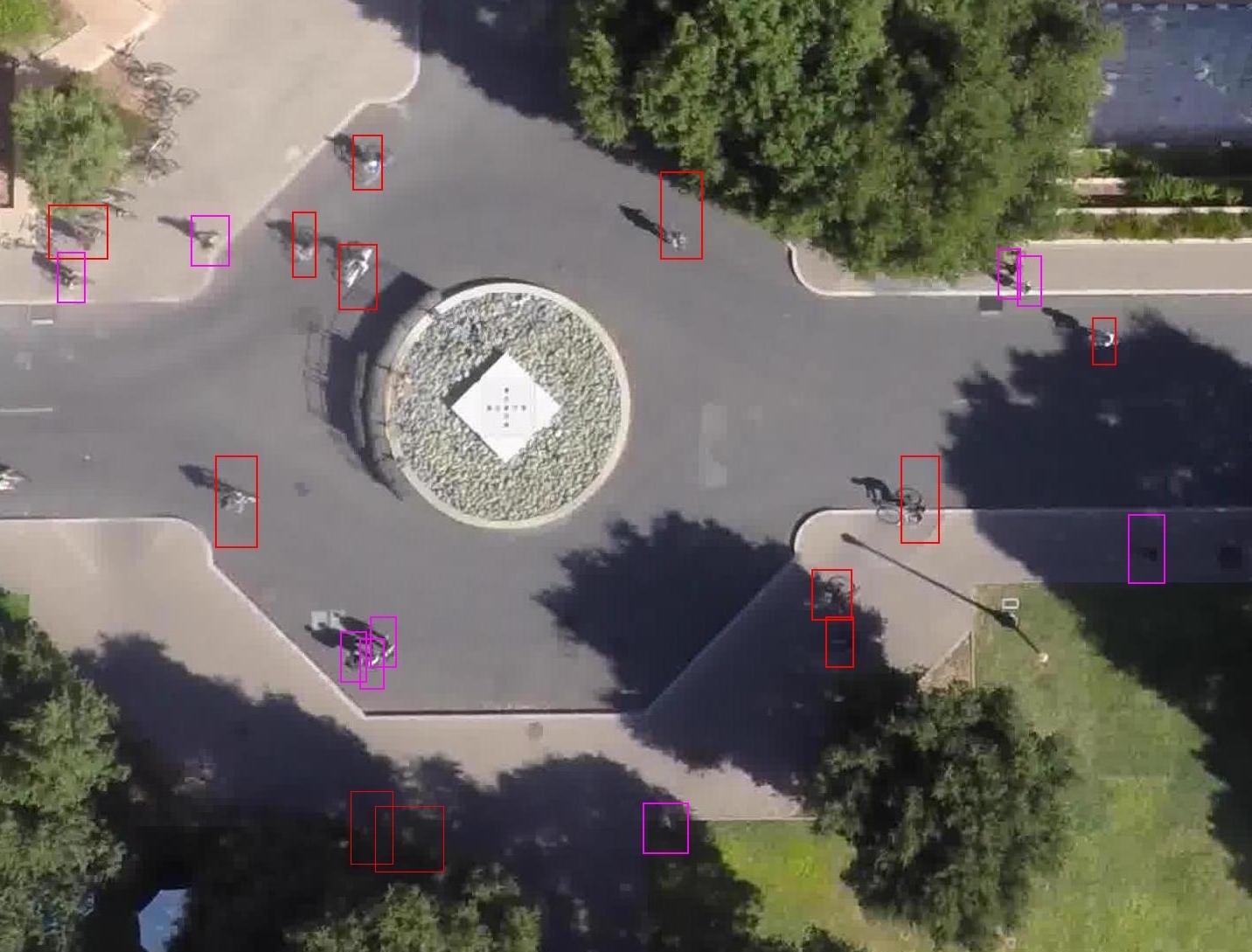
Learned uncertainty-aware multi-agent trajectories via neural networks and unscented Kalman filters.

Developed algorithms for object retrieval in unstructured environments from natural language commands.

Modelled a stock market game as a POMDP in an OpenAI Gym environment, and built a RL agent to solve it.
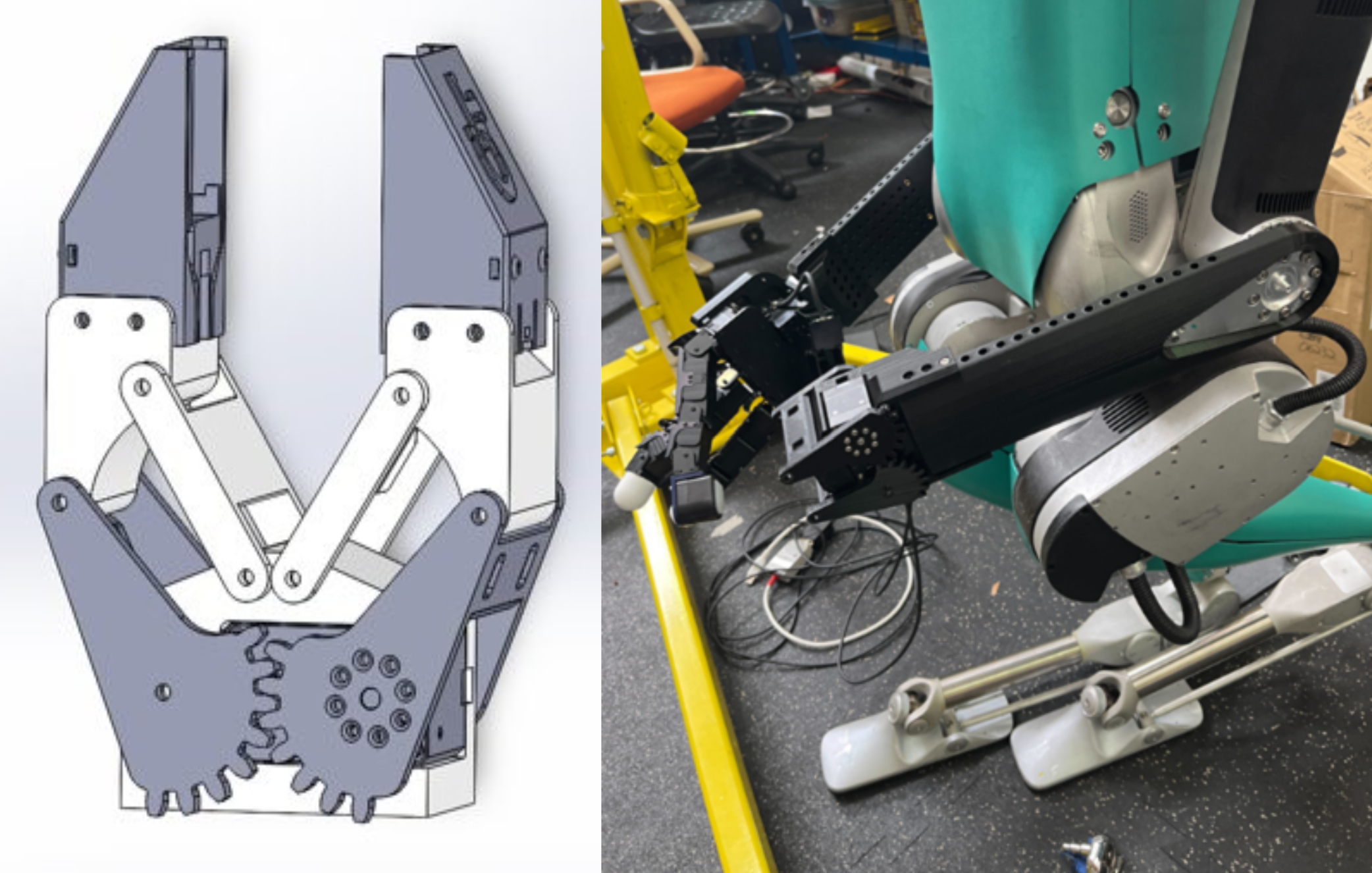
Designed, fabricated, and integrated a 3DOF attachable gripper with Gelsight sensors embedded.

Built an automated test, mechanical fixture and controller for prosthetic knee valve actuator.
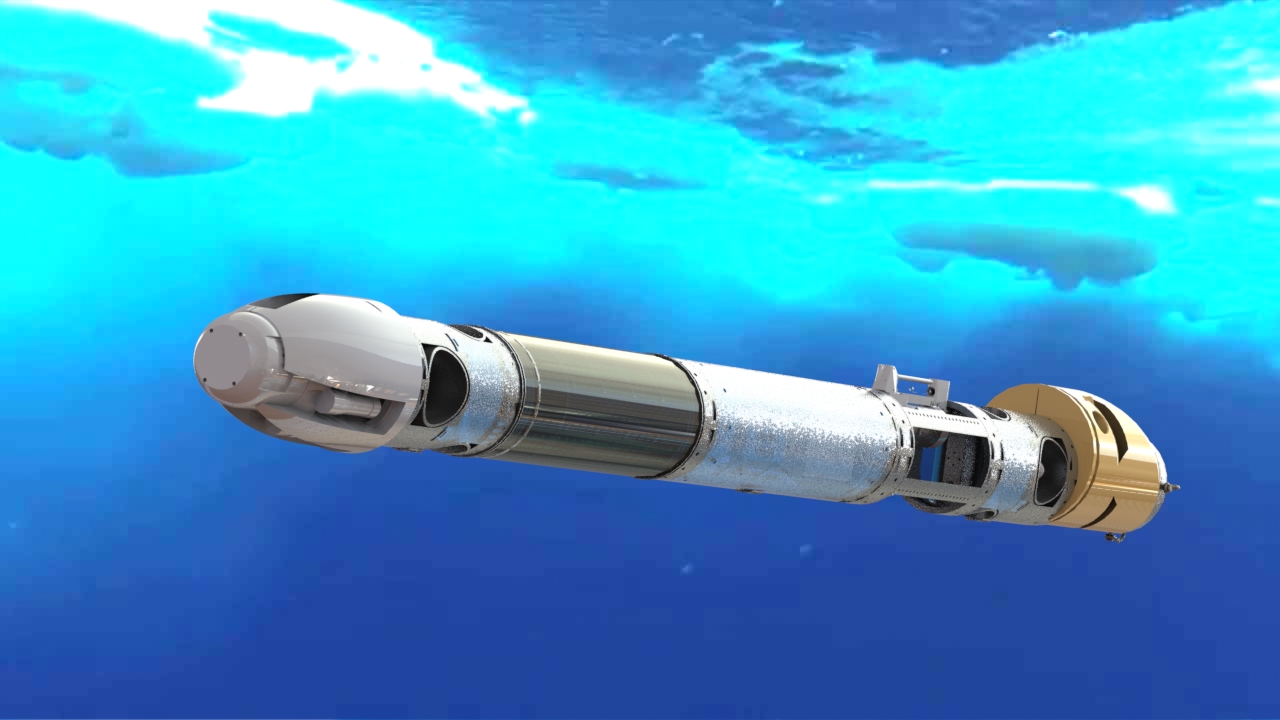
Built the thruster and battery modules for an autonomous under-ice vehicle, while achieving orientation control.
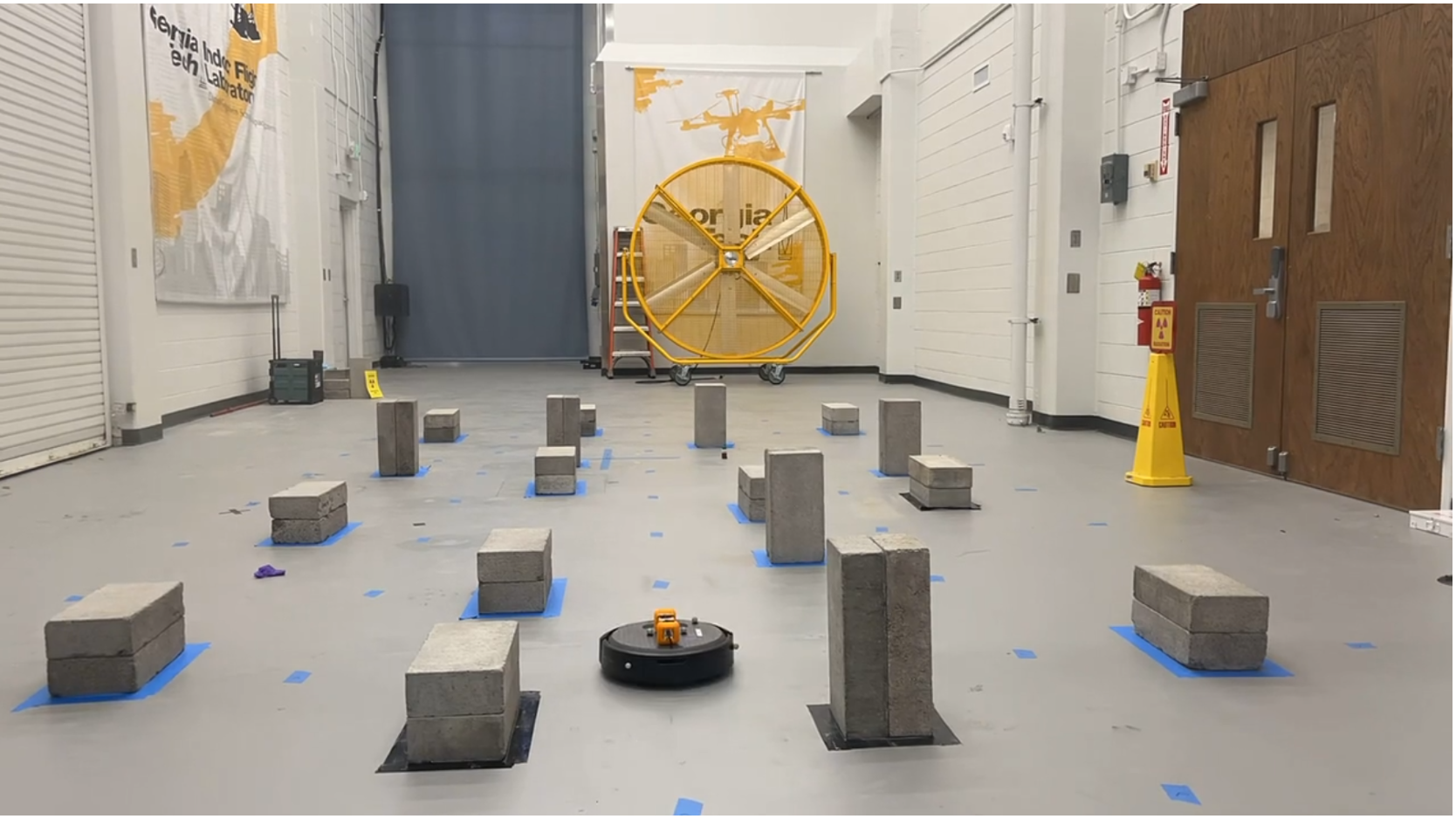
Generated an optimal path for a UGV to measure and map sources of radiation in a nuclear contamination zone.
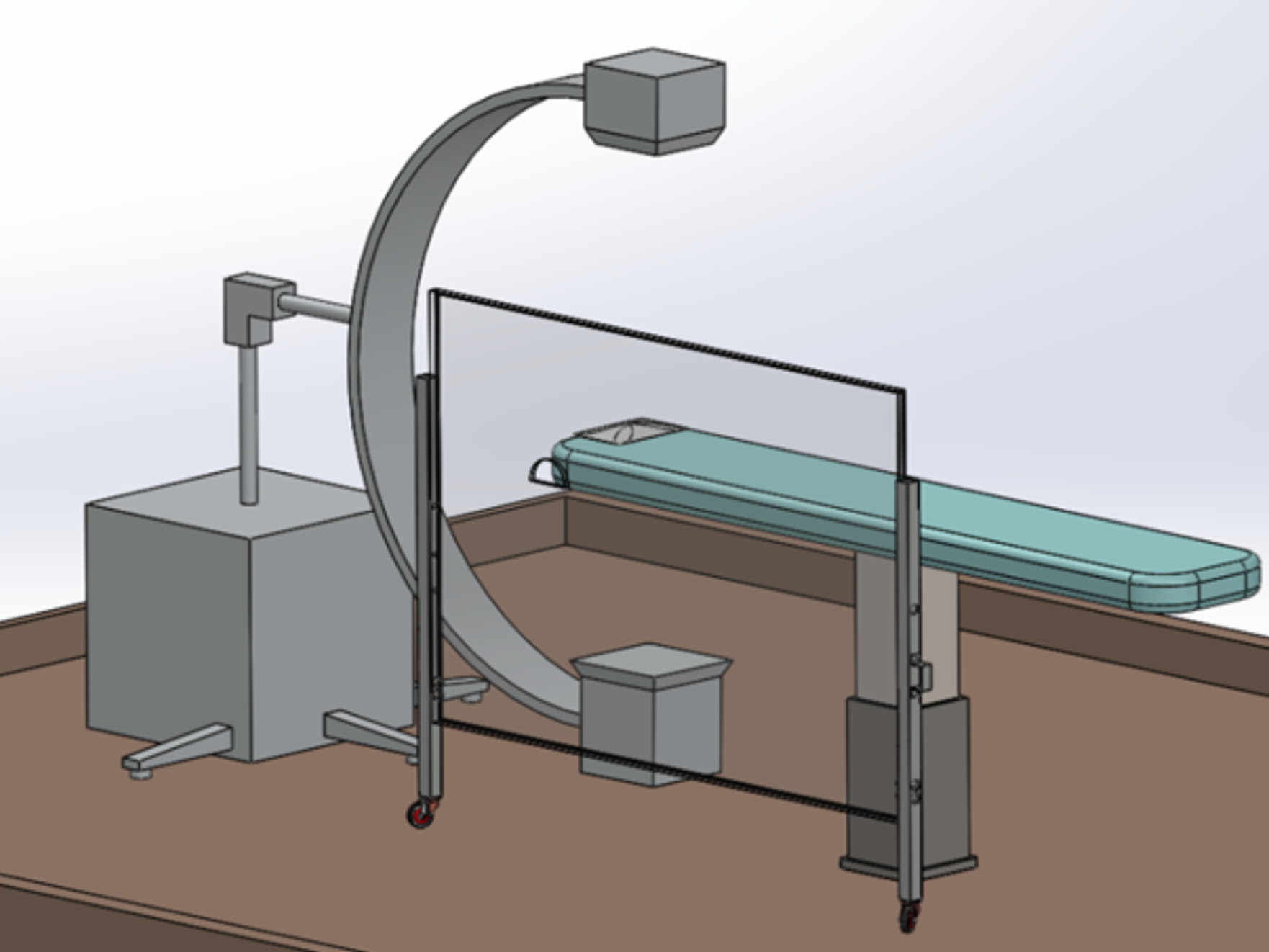
Designed an efficient biomedical shield with a novel radiation-absorpent alloy that reduces operator exposure.
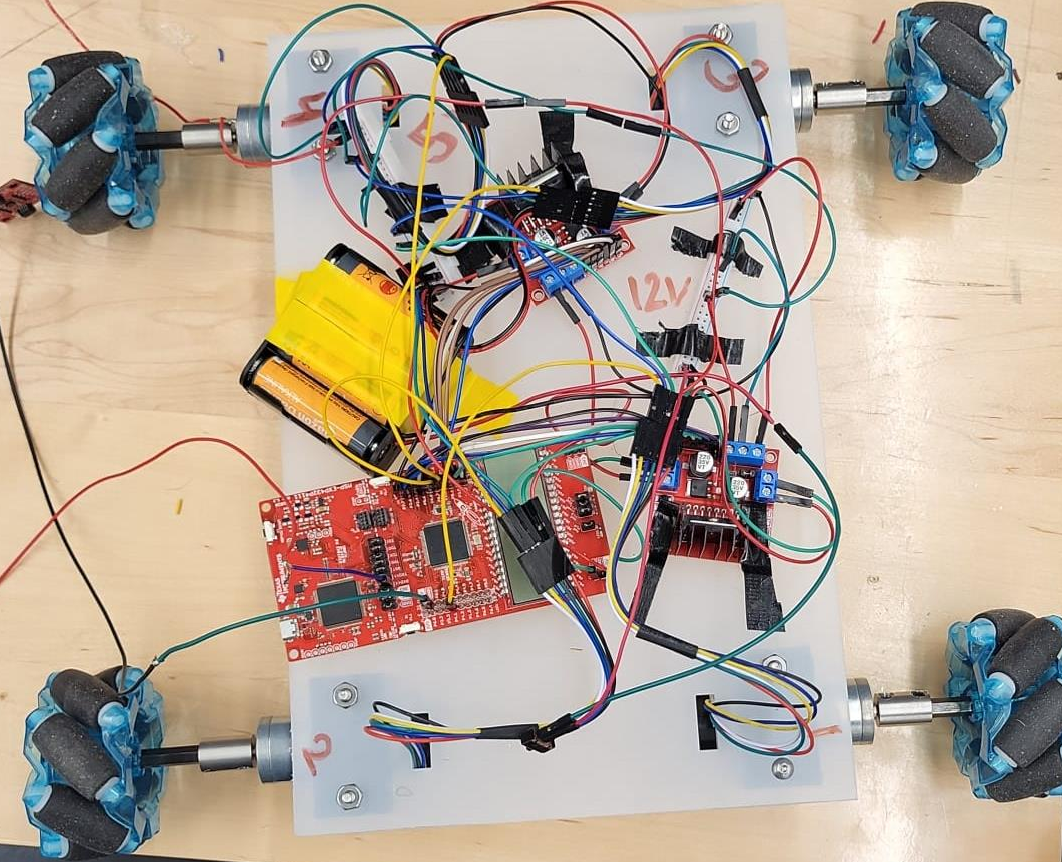
Designed and built a hand-controlled RC car electromechanical system, using the MSP432 microcontroller.
Performed controller analysis on automatic platform stabilizer system for any perturbations.
Skills
Programming Languages
Frameworks and Libraries
 Git
Git
Software Tools
Hardware
Education
Palo Alto, California, USA
Degree: Master of Science in Mechanical Engineering
GPA: 3.80/4.00
Depth: Robotics & Kinematics
Labs: Biomechatronics LabIPRLARM Lab
- Optimal Control
- Advanced Dynamics, Simulation & Control
- Robot Perception
- State Estimation & Filtering
Relevant Coursework:
Georgia Institute of Technology
Atlanta, Georgia, USA
Degree: Bachelor of Science in Mechanical Engineering
GPA: 3.82/4.00
Minor: Computer Science - Computing & Theory
Concentration: Automation & Robotic Systems
- Control of Dynamic Systems
- Mechatronics
- Advanced Algorithms
- Machine Design
Relevant Coursework: