Radiological Zone UGV Path Planner
Outcome:
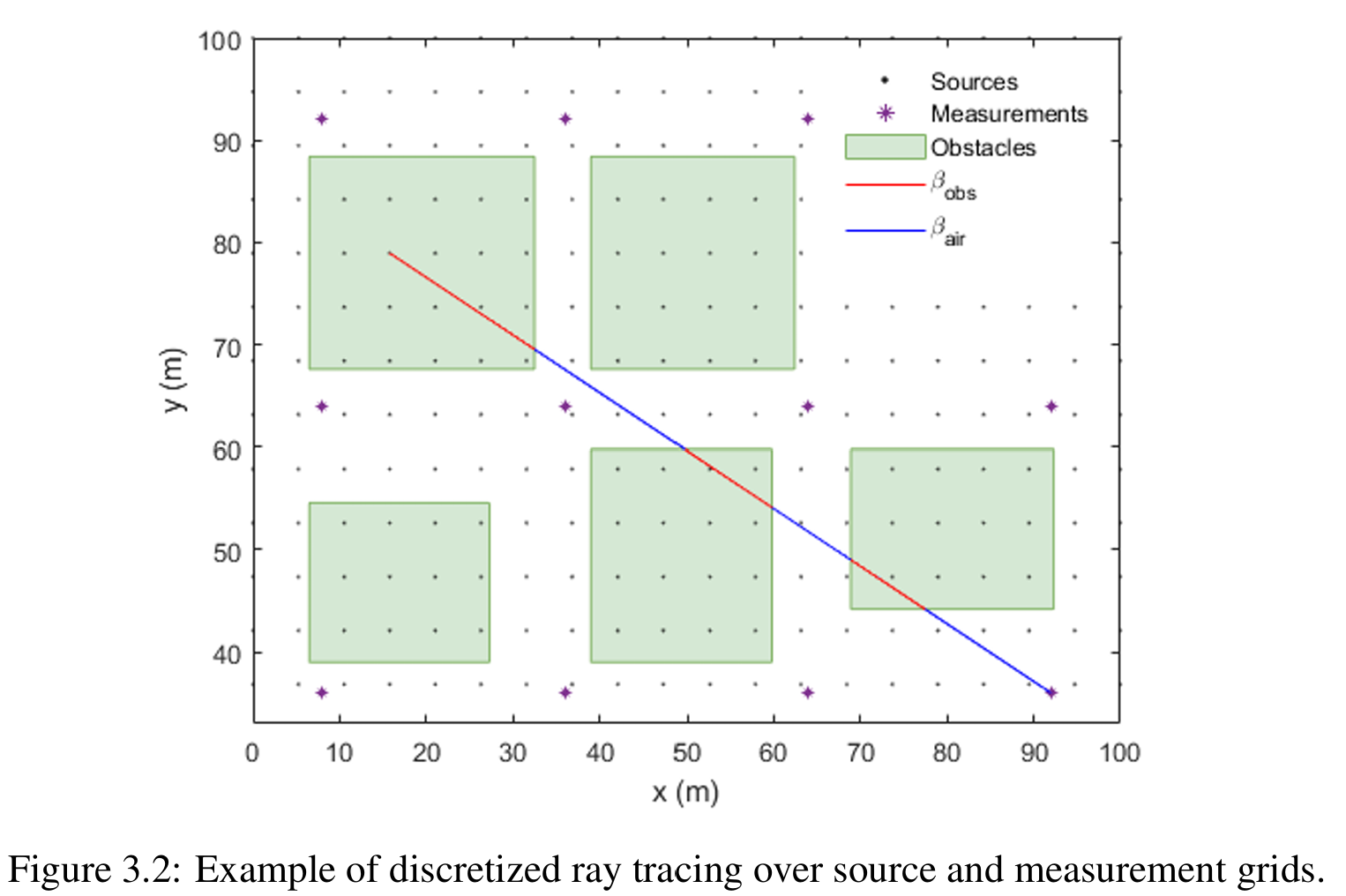
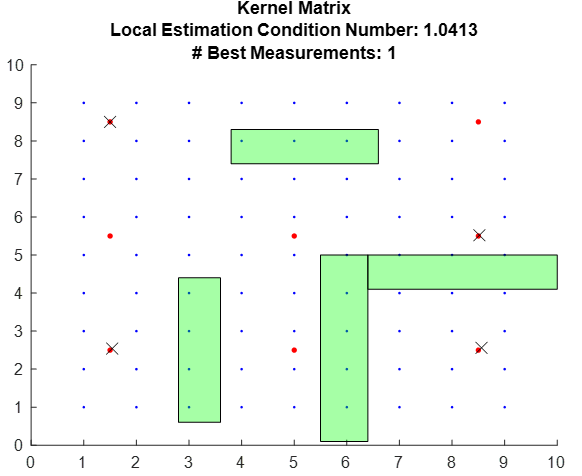
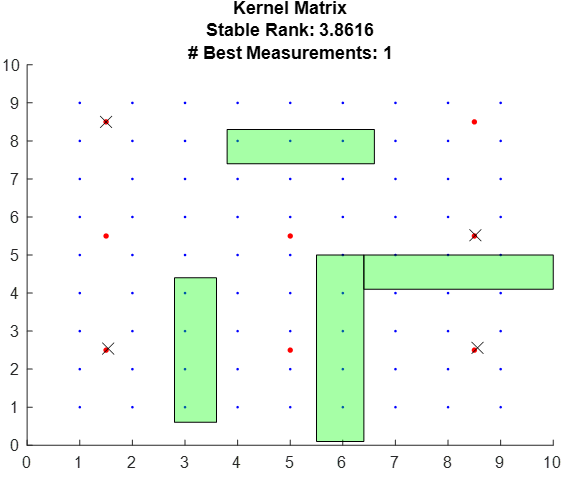
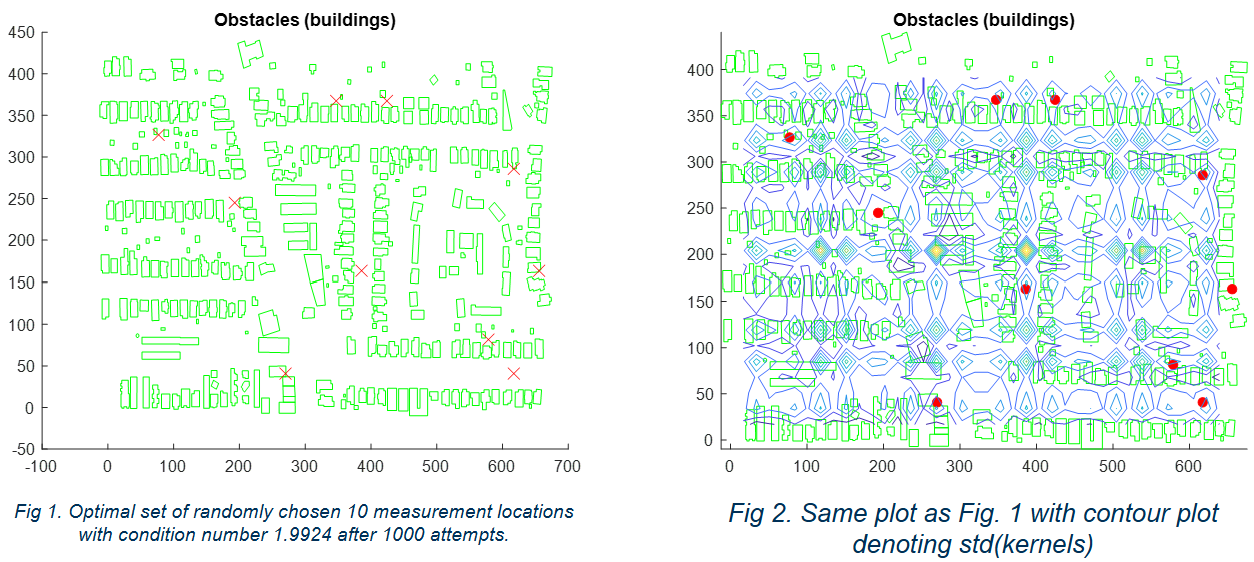
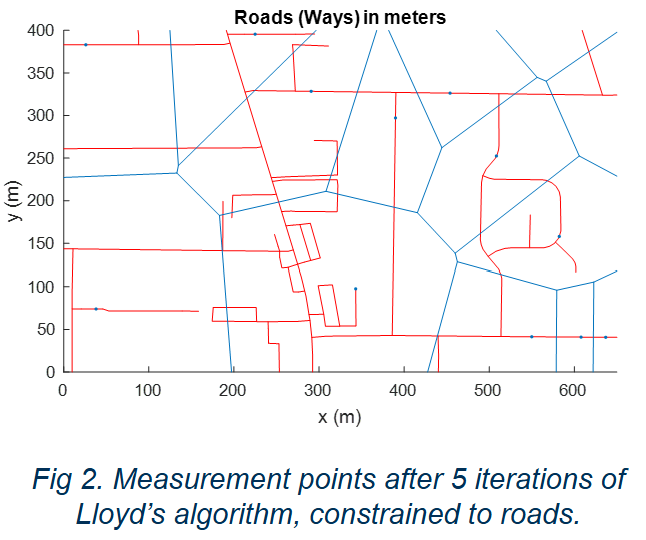
I leveraged information theory and computational geometry to generate an optimal path for a UGV to map the sources of radiation in a nuclear contamination zone. I utilized attenuation kernels developed using a particle filter to measure obstacle interference in radiation signal measurements. By designing a cost function combining metrics such as condition number and stable rank of these kernels and the Fisher Information Matrix of these kernels, I built a working planner that found the minimal number of optimal radiation measurement sites with minimal signal interference that mapped the entire nuclear contamination zone.
Motivation:
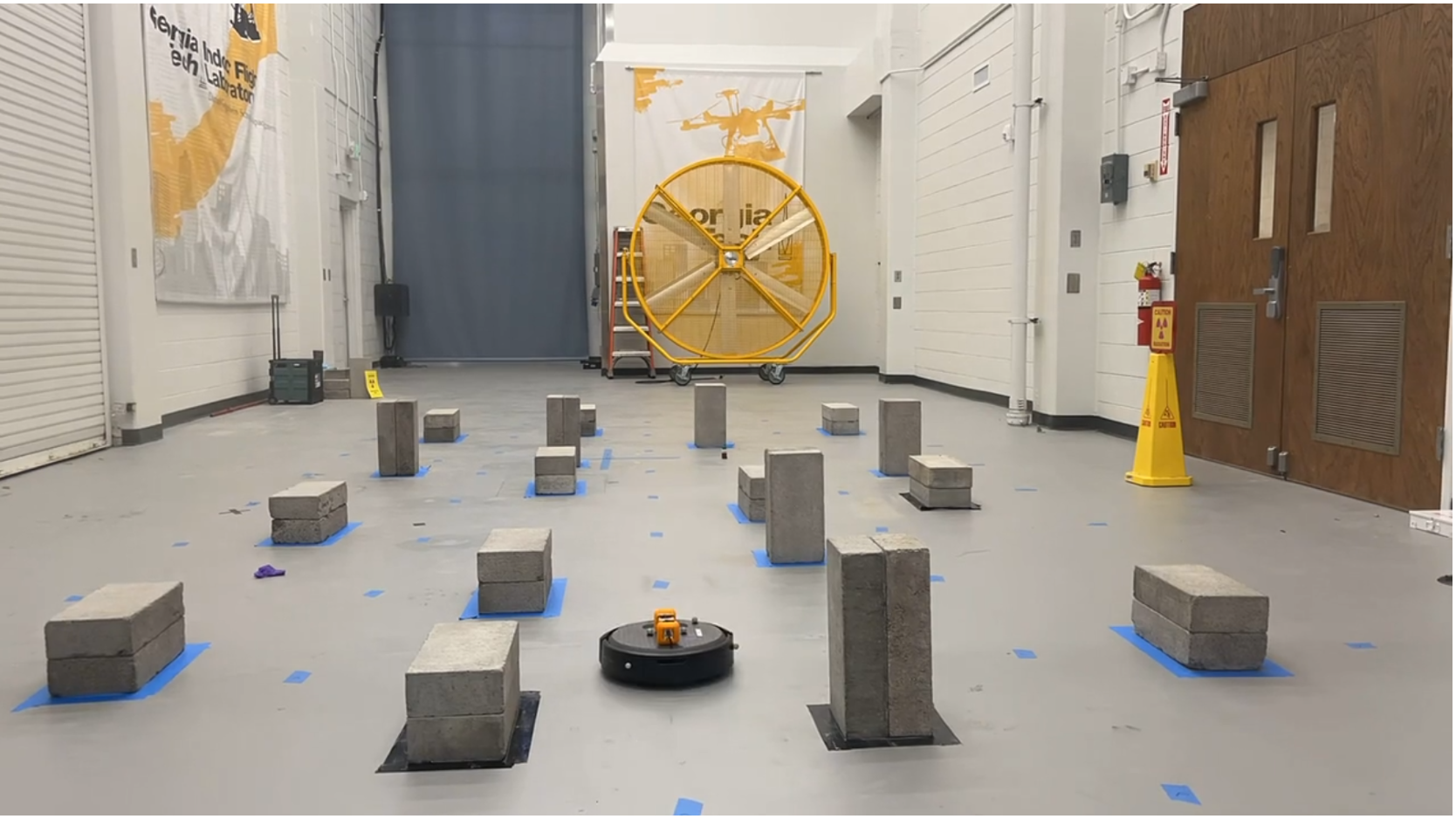
Radiological search and mapping are two separate problems that are currently performed by human operators in the field. These tasks could not only be more effective when performed by robotic agents, doing so would also keep human operators from being exposed to gamma radiation. Radiological mapping is the process of taking measurements to build an understanding of the contamination of an area as quickly as possible. This usually implies some degree of coverage for a predefined area. Radiological search is a similar problem that focuses on inferring what the parameters of a source of emissions might be and localizing them as quickly as possible.
While a variety of techniques exist for both problems, they often have limitations that would prohibit effective and practical deployment. This work has two goals. The first is to improve current mapping methods. This is done by using information driven search with a novel configuration of air and ground robots equipped with counting instruments. The improvements gained are quantified with Monte Carlo simulations. The information driven method will be compared to the same configuration of robots performing random sampling and a configuration of ground robots performing a systematic rectilinear search. The second goal is to address the search problem with a refined particle filtering algorithm for localizing, identifying, and characterizing point sources of gamma radiation in the presence of obstacles. By using parallel particle filters to develop precomputed attenuation kernels, isotope sources can be isolated in contaminated areas.
Results:
This is a multi-objective optimization problem, which requires balancing measurement informativeness and practical constraints such as travel cost. My proposed solver aims to maximize the condition numbers and the normalized Frobenius norm of the Fisher Information Matrix and attenuation kernel matrices. Both these indicate the informativeness of each measurement point for estimating the radiological source parameters in the system. There are a few optimization approaches which I suggest, namely a cost function combining those considerations, a continuous relaxation approach, and a metaheuristic approach. This optimization problem allowed me to dive deep into designing and implementing multi-objective optimizers in situations with many unknown parameters. As my first foray into the world of optimization, it was challenging to understand the applicability of some of this material, however it was very rewarding to witness a working simulation of my solver.
Optimizer Theory Documentation:
Foundational Dissertation: